Conversation
|
Ignore some changes that git is showing that are already in master, it has trouble with squashed commits and rebases. Let me know if something is missing or needs explanation! |
|
@apollokit @ericjunkins bump |
There was a problem hiding this comment.
Code looks good, and it runs fine on my rover with ROS1.
Couple things:
- are you going to put in a proper covariance estimate?
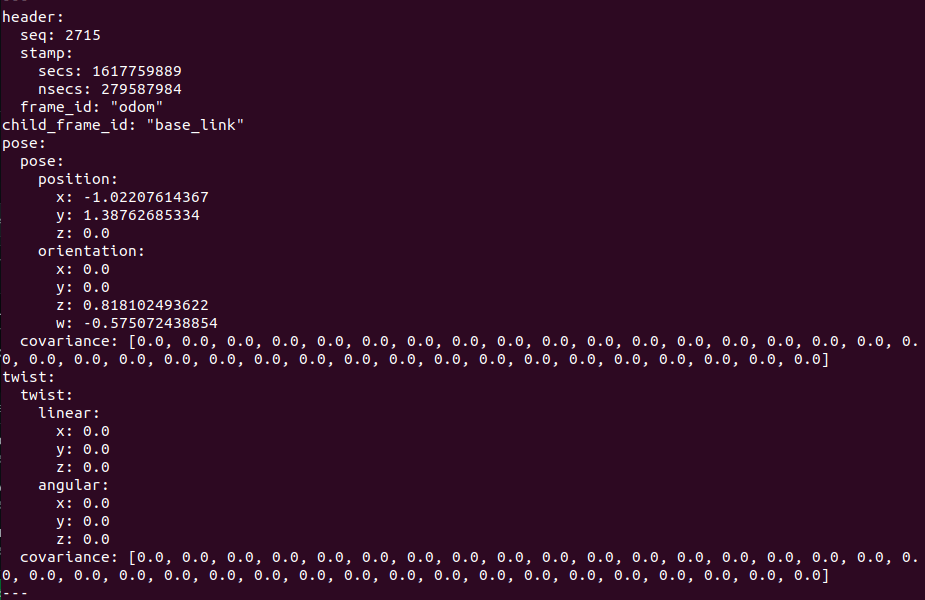
- would be nice to have a little bit of an explanation of the odometry message somewhere in the docs (a .md file in this repo is fine). I would just briefly explain the output of
rostopic echo odom, as seen in the screencap below
|
Added a reference link and covariance. Since odometry is not enabled by default and is a more advanced option, I don't think we should explain it in the repo. Instead I added a link to my blog. |
Can you at least mention here what the units are on pose and twist? Or give a link where someone can find out? I understand it's a more advanced option, but seems like its helpfulness is limited without at least some context... |
|
This is the standard ROS odometry message, which is described in the link that I added (did you see the link?). For those who are going to set up a nav stack, they will need odometry at one point, which is what this is for. Someone who doesn't want to build a nav stack shouldn't care about launching odometry in the first place. |
a'ight |
Description
Wheel odometry is a commonly used form of odometry useful for e.g. localization and mapping.
Default behavior is to not calculate it. It can be enabled using an argument;
To Do